and the distribution of digital products.
ICPL Baseline Methods: Disagreement Sampling and PrefPPO for Reward Learning
- Abstract and Introduction
- Related Work
- Problem Definition
- Method
- Experiments
- Conclusion and References
\ A. Appendix
A.1. Full Prompts and A.2 ICPL Details
A.6 Human-in-the-Loop Preference
A.3 BASELINE DETAILS
\
\
\
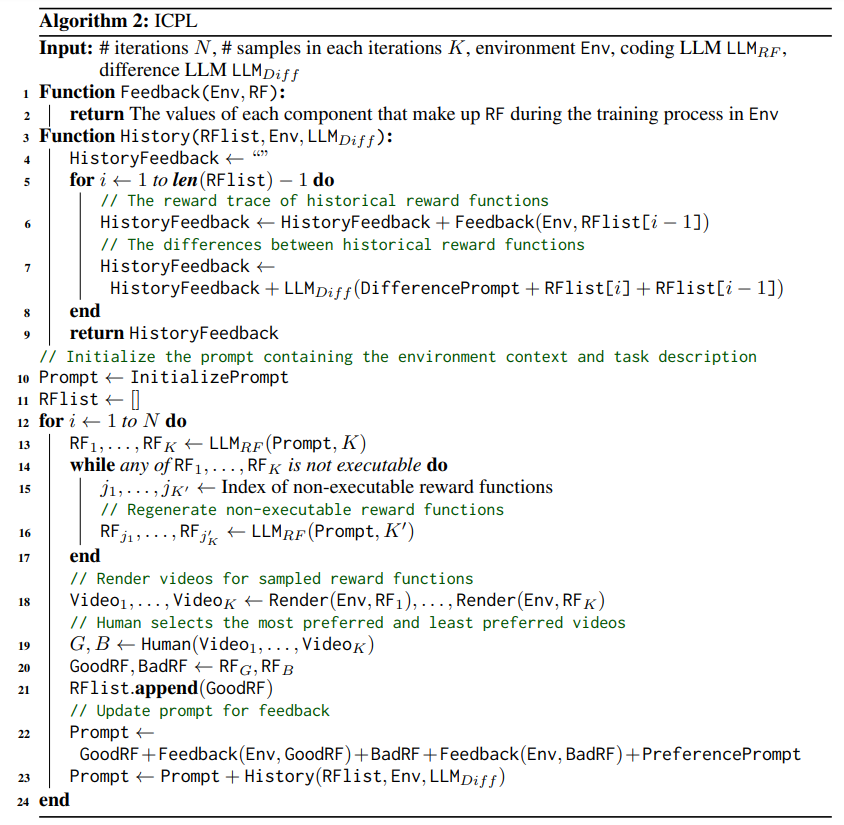
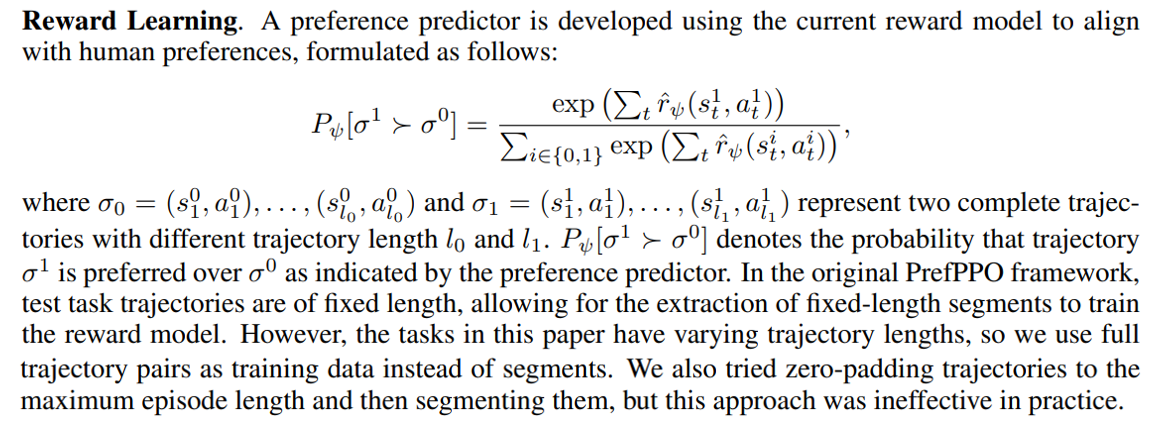
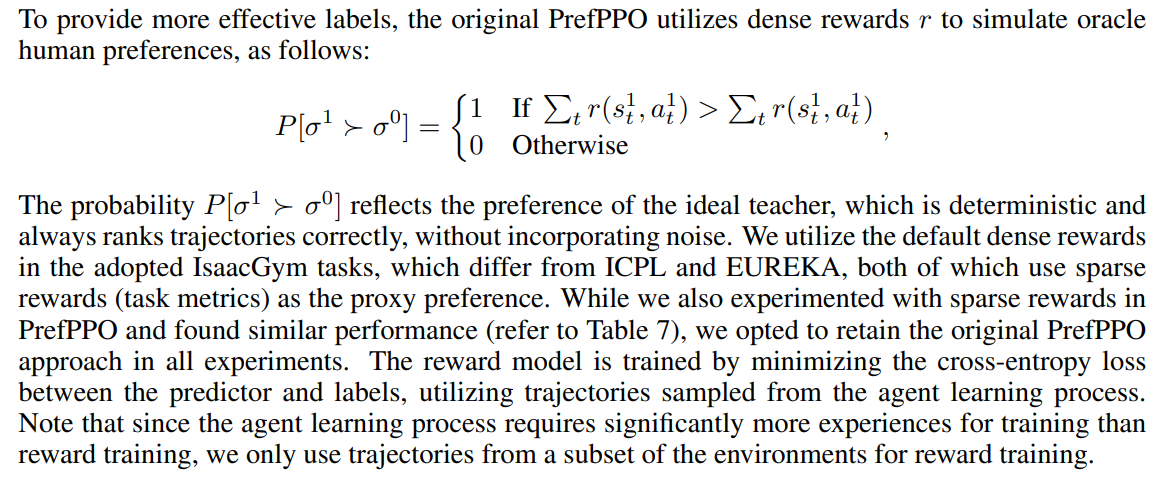
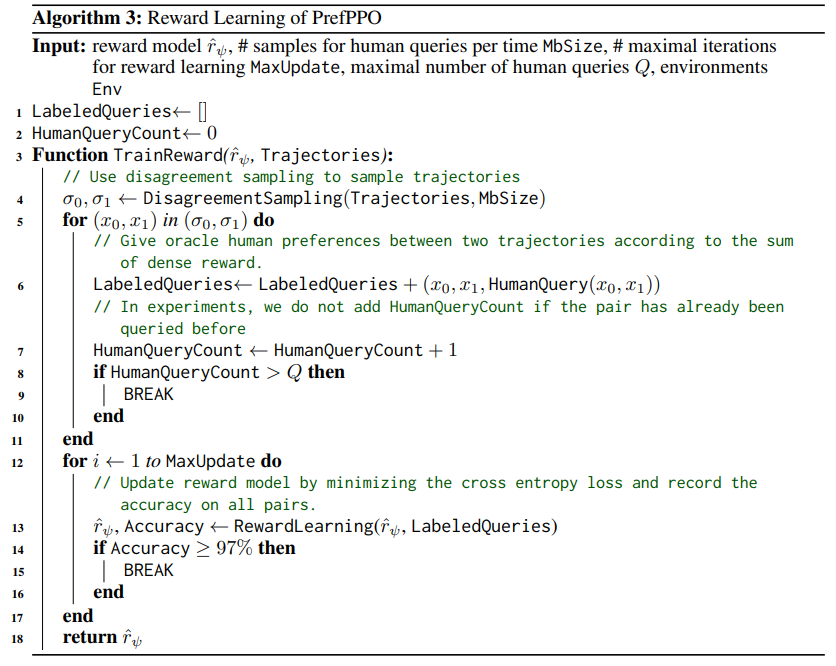
\ To sample trajectories for reward learning, we employ the disagreement sampling scheme from (Lee et al., 2021b) to enhance the training process. This scheme first generates a larger batch of trajectory pairs uniformly at random and then selects a smaller batch with high variance across an ensemble of preference predictors. The selected pairs are used to update the reward model.
\ For a fair comparison, we recorded the number of times PrefPPO queried the oracle human simulator to compare two trajectories and obtain labels during the reward learning process, using this as a measure of the human effort involved. In the proxy human experiment, we set the maximum number of human queries Q to 49, 150, 1.5k, and 15k. Once this limit is reached, the reward model ceases to update, and only the policy model is updated via PPO. Algo. 3 illustrates the pseudocode for reward learning.
\
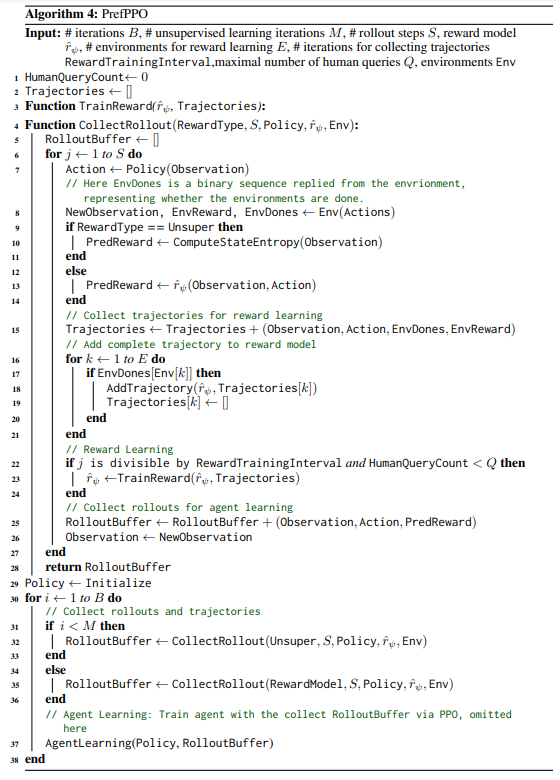
\ Algo. 4 illustrates the pseudocode for PrefPPO.
\
\
:::info Authors:
(1) Chao Yu, Tsinghua University;
(2) Hong Lu, Tsinghua University;
(3) Jiaxuan Gao, Tsinghua University;
(4) Qixin Tan, Tsinghua University;
(5) Xinting Yang, Tsinghua University;
(6) Yu Wang, with equal advising from Tsinghua University;
(7) Yi Wu, with equal advising from Tsinghua University and the Shanghai Qi Zhi Institute;
(8) Eugene Vinitsky, with equal advising from New York University ([email protected]).
:::
:::info This paper is available on arxiv under CC 4.0 license.
:::
\