and the distribution of digital products.
Graph Embeddings and Node Learning on Grassmann Manifolds
Proposed Approach
C. Formulation of MLR from the Perspective of Distances to Hyperplanes
H. Computation of Canonical Representation
3.4 NEURAL NETWORKS ON GRASSMANN MANIFOLDSIn this section, we present a method for computing the Grassmann logarithmic map in the projector perspective. We then propose GCNs on Grassmann manifolds.
\ 3.4.1 GRASSMANN LOGARITHMIC MAP IN THE PROJECTOR PERSPECTIVE
\ The Grassmann logarithmic map is given (Batzies et al., 2015; Bendokat et al., 2020) by
\
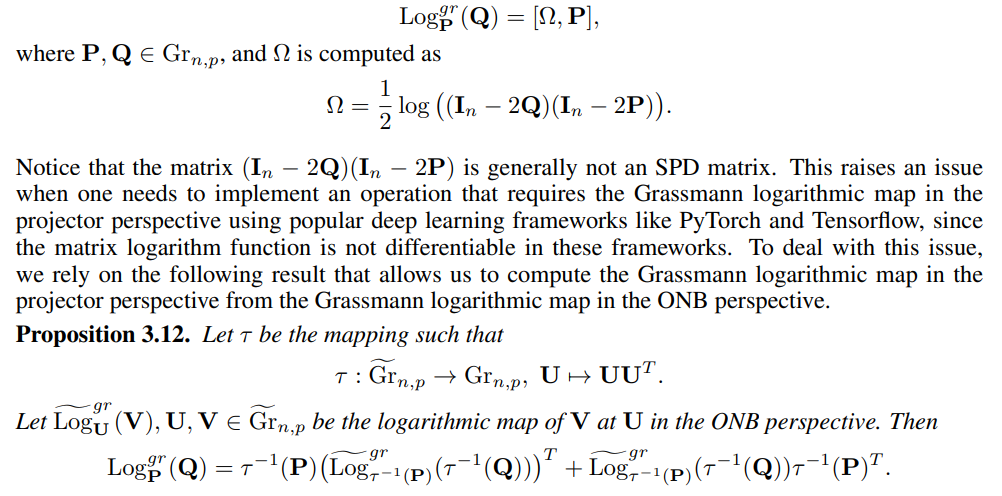
\ Proof See Appendix N.
\

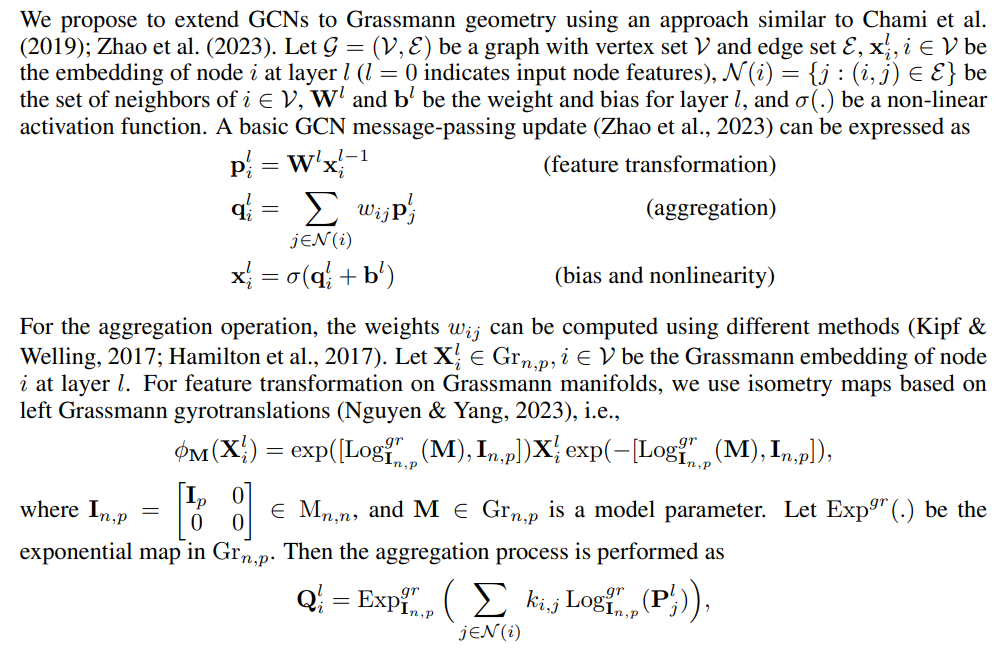
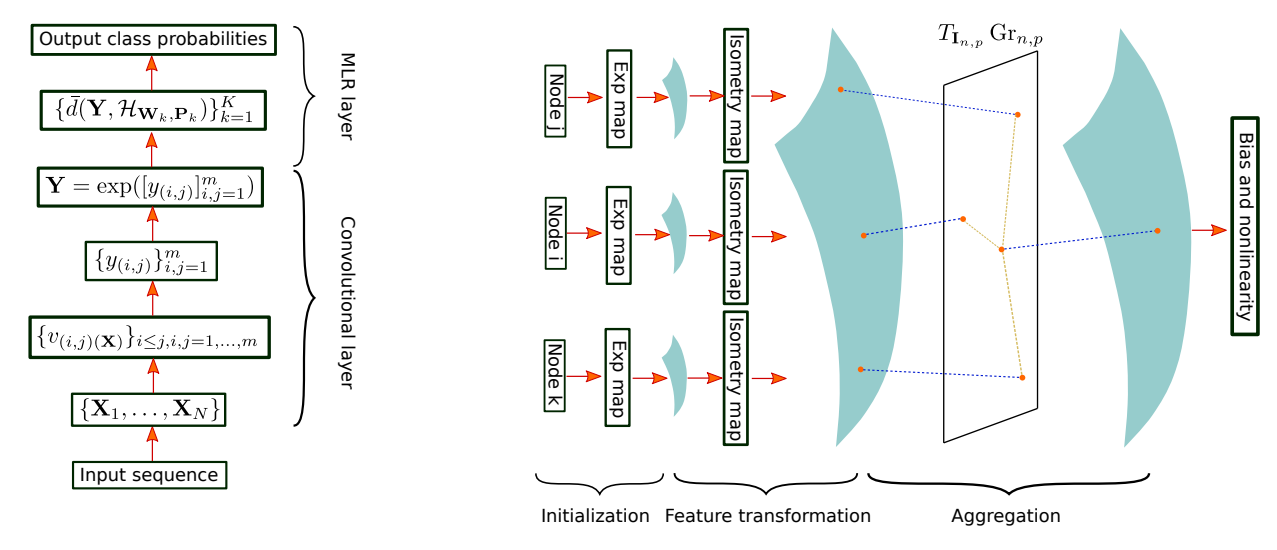
\ 3.4.2 GRAPH CONVOLUTIONAL NETWORKS ON GRASSMANN MANIFOLDS
\
\
\
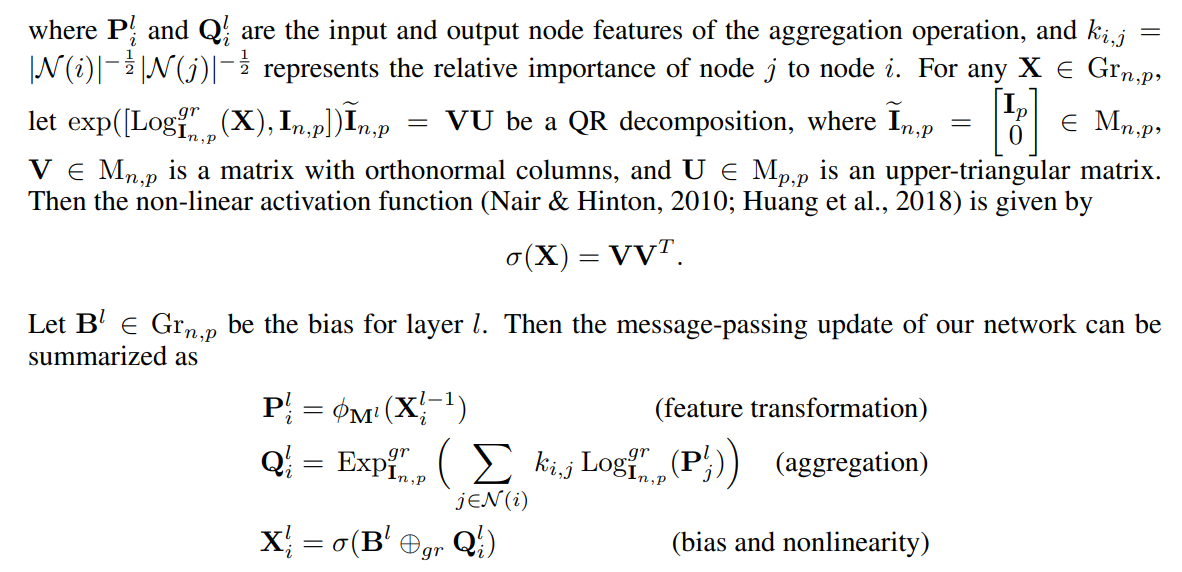
\ The Grassmann logarithmic maps in the aggregation operation are obtained using Proposition 3.12.
\ Another approach for embedding graphs on Grassmann manifolds has also been proposed in Zhou et al. (2022). However, unlike our method, this method creates a Grassmann representation for a graph via a SVD of the matrix formed from node embeddings previously learned by a Euclidean neural network. Therefore, it is not designed to learn node embeddings on Grassmann manifolds.
\
:::info Authors:
(1) Xuan Son Nguyen, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]);
(2) Shuo Yang, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]);
(3) Aymeric Histace, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]).
:::
:::info This paper is available on arxiv under CC by 4.0 Deed (Attribution 4.0 International) license.
:::
\